Publications
2025
-
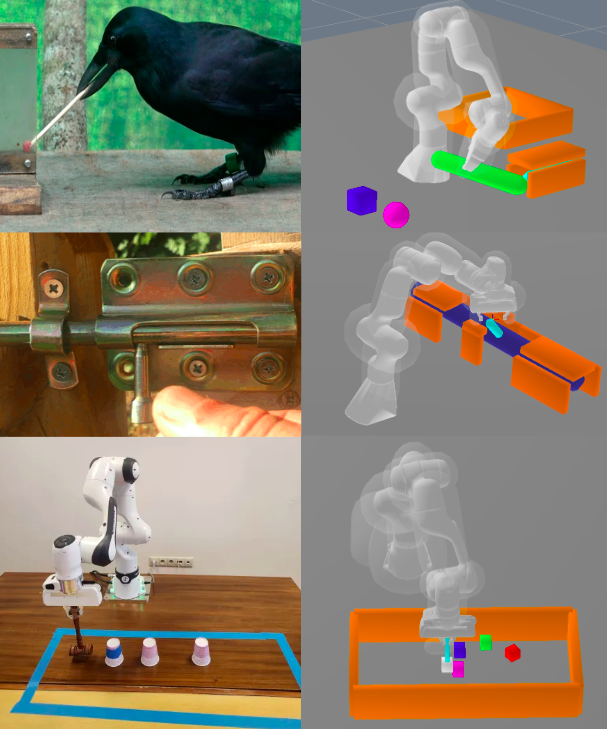 H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025
H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025

2024
-
 Interpretable Responsibility Sharing as a Heuristic for Task and Motion PlanningarXiv preprint arXiv:2409.05586, 2024
Interpretable Responsibility Sharing as a Heuristic for Task and Motion PlanningarXiv preprint arXiv:2409.05586, 2024

2023
-
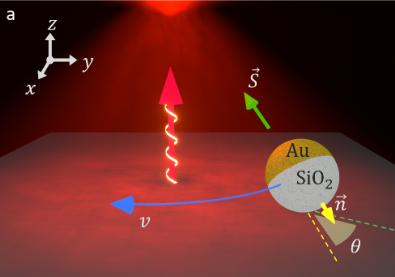 Optically Driven Janus Microengine with Full Orbital Motion ControlACS Photonics, 2023
Optically Driven Janus Microengine with Full Orbital Motion ControlACS Photonics, 2023 -
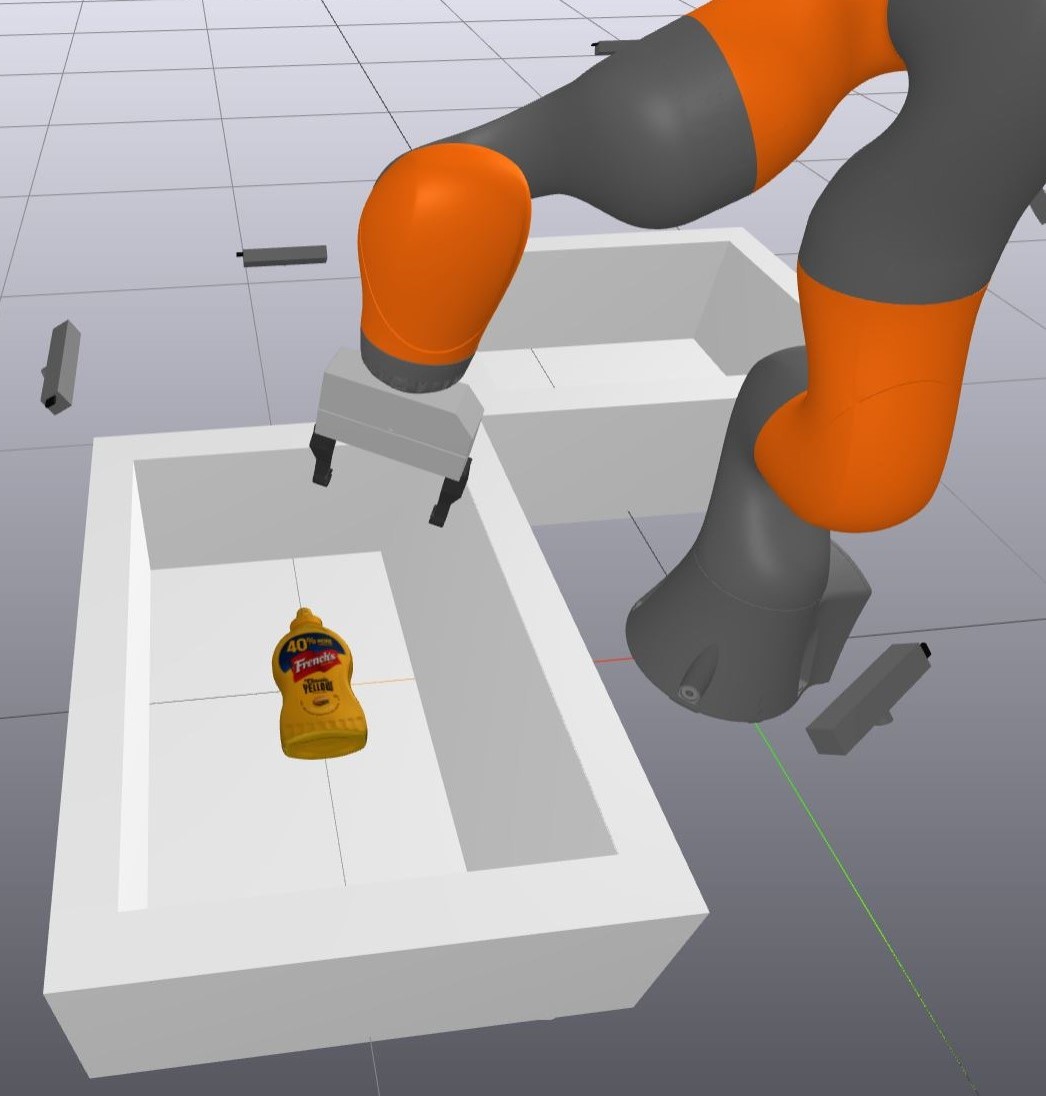 FViT-Grasp: Grasping Objects With Using Fast Vision Transformers(arXiv), 2023
FViT-Grasp: Grasping Objects With Using Fast Vision Transformers(arXiv), 2023


-
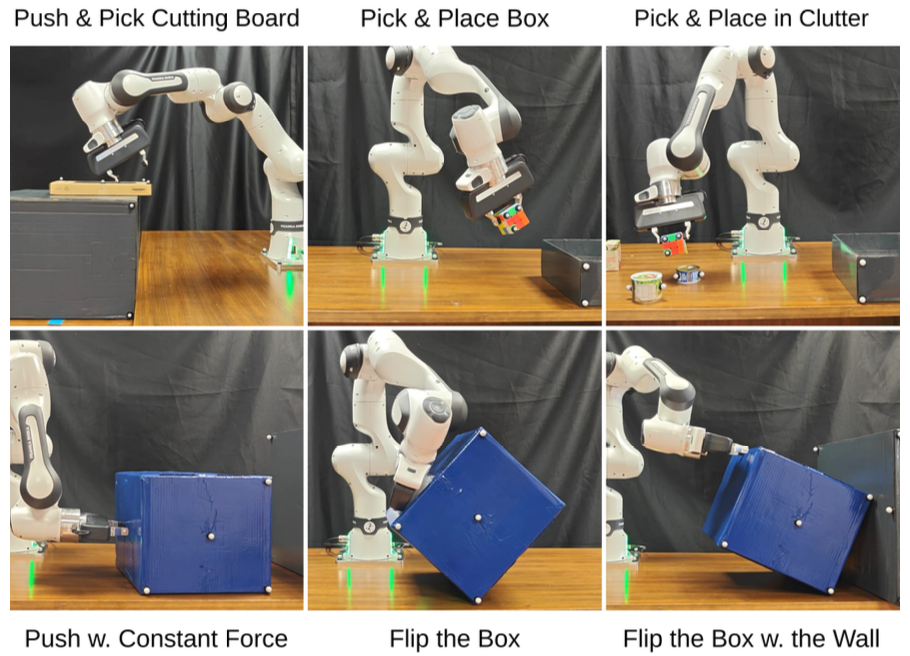 Contact-VLA: zero-shot planning and control for contact-rich manipulation2023
Contact-VLA: zero-shot planning and control for contact-rich manipulation2023
