Berk Çiçek

I recently completed my M.S. in Computer Engineering at Bilkent University, where I focused on Robot Learning, Vision-Language-Action Models, and Contact-Rich Manipulation. I was fortunate to be advised by Dr. Ozgur S. Oguz at the Bilkent Learning for Intelligent Robot Assistants Lab (LIRA).
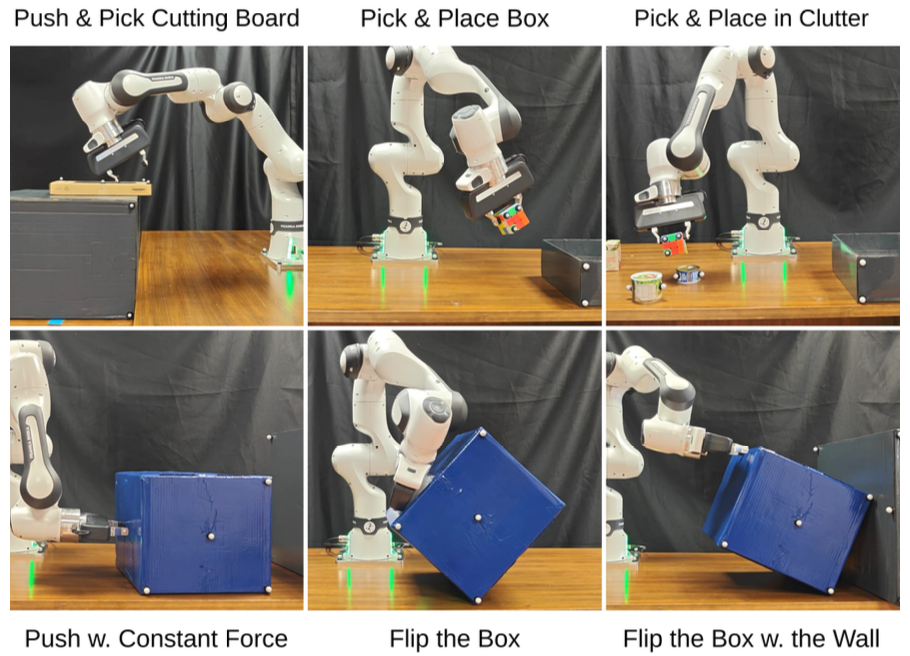
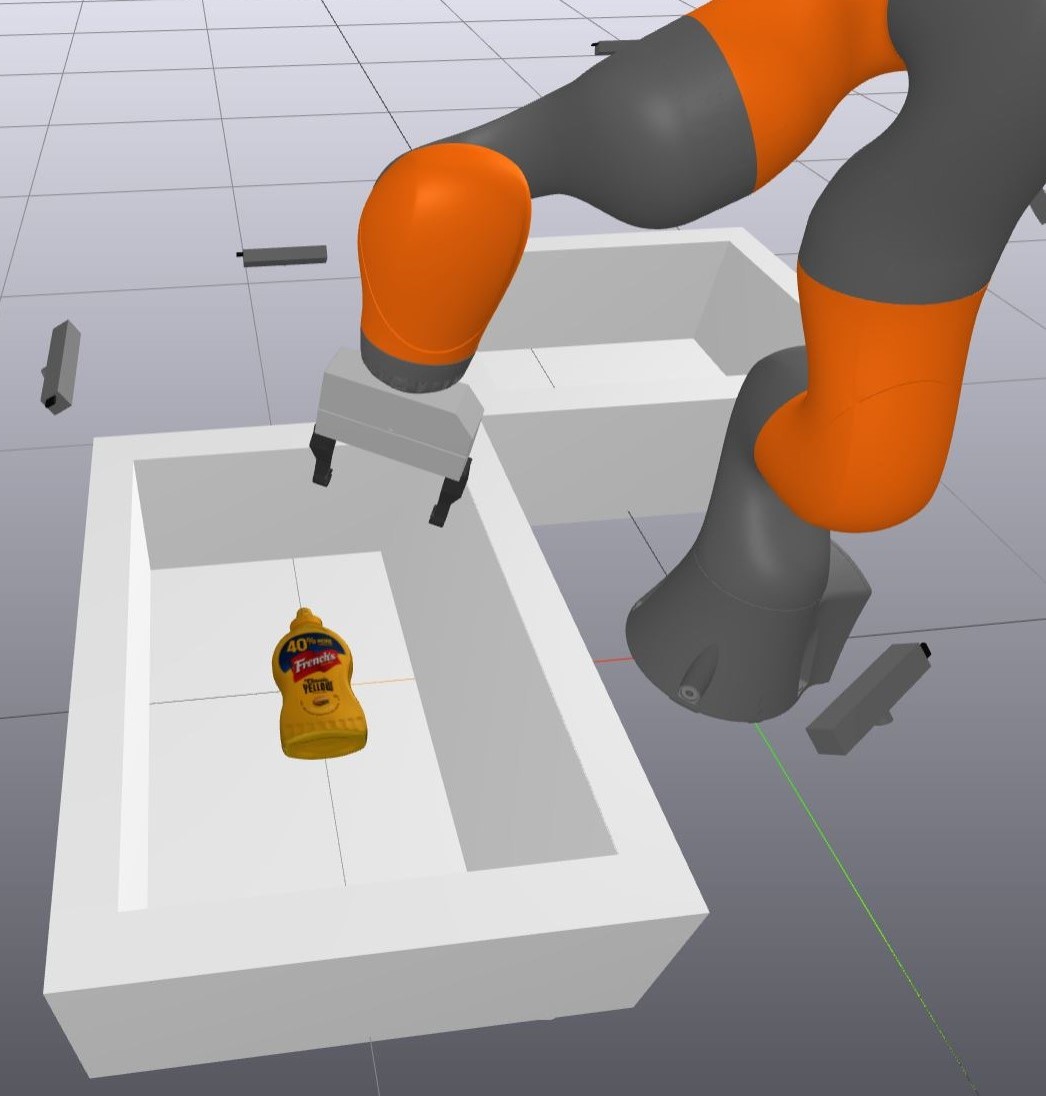
My research bridges foundation models and embodied AI, with a particular focus on enabling robots to perform complex, contact-rich manipulation tasks through neuro-symbolic reasoning. My master’s thesis, Contact-VLA, introduces CoRAL (Contact-Rich Adaptive LLM-based Control)—a framework that leverages Large Language Models as adaptive world model designers and cost function synthesizers for model predictive control, achieving robust zero-shot manipulation on novel tasks.
My work has been published in venues including RSS 2026, IEEE RA-L (with presentation at ICRA 2026) and ACS Photonics. I’m passionate about developing AI systems that can reason about physical interactions, adapt to uncertainties, and generalize across diverse manipulation scenarios.
I obtained my B.S. in Mechanical Engineering from Bilkent University, where I developed a strong foundation in dynamics, control, and computational modeling that complements my work in robot learning.
Currently, I’m a Data Scientist at Trendyol developing AI-powered search algorithms, while continuing research collaborations at LIRA Lab. I’m also actively developing PuzzleWorld-3D, an API-based benchmark for evaluating embodied AI agents.
For more details, check out my CV, and Google Scholar.
Feel free to reach out via email—I’m always happy to discuss research ideas, collaborations, or just chat about robotics and AI!
news
| Apr 30, 2026 | 🎉 Our paper CoRAL: Contact-Rich Adaptive LLM-based Control for Robotic Manipulation has been accepted to RSS 2026! You can access: here |
|---|---|
| Jan 30, 2026 | 🎉 Our paper H-MaP: Iterative and Hybrid Sequential Manipulation Planner has been accepted to RA-L 2025! Will be presented at ICRA 2026 in Vienna. |
| Sep 30, 2025 | Successfully defended my M.S. thesis on Contact-VLA: Zero-Shot Planning and Control for Contact-rich Manipulation! 🎓 |
| Sep 20, 2025 | 🏆 Won the Trendyol AI Hackathon with our AI-powered search algorithm! |
| Oct 9, 2023 | Our project, ‘FViT-Grasp: Grasping Objects With Using Fast Vision Transformers’ is finished. You can access the manuscript here |
selected publications
-
 CoRAL: Contact-Rich Adaptive LLM-based Control for Robotic ManipulationarXiv preprint arXiv:2605.02600, 2026
CoRAL: Contact-Rich Adaptive LLM-based Control for Robotic ManipulationarXiv preprint arXiv:2605.02600, 2026 -
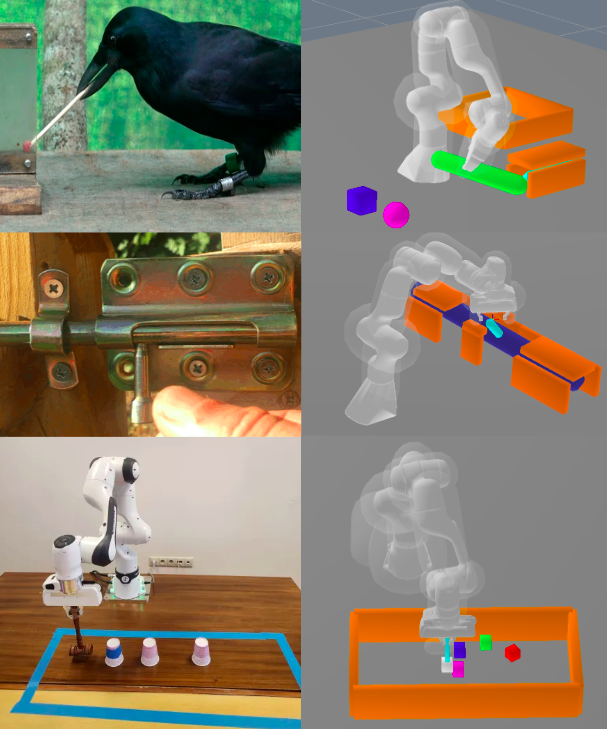 H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025
H-MaP: An Iterative and Hybrid Sequential Manipulation PlannerIEEE Robotics and Automation Letters, 2025 - Contact-VLA: zero-shot planning and control for contact-rich manipulation2025
-
 FViT-Grasp: Grasping Objects With Using Fast Vision Transformers(arXiv), 2023
FViT-Grasp: Grasping Objects With Using Fast Vision Transformers(arXiv), 2023 -
 Interpretable Responsibility Sharing as a Heuristic for Task and Motion PlanningarXiv preprint arXiv:2409.05586, 2024
Interpretable Responsibility Sharing as a Heuristic for Task and Motion PlanningarXiv preprint arXiv:2409.05586, 2024



